







飞行时间测量法是通过测量发射信号从被测物体返回的时间间隔来间接完成距离测量。在实际应用中,发送器发射一组突发信号,信号遇到物体后被反射,然后被传感器的接收器所捕获。传感器的电子元件分析信号所经历的时间以及所发生的相位偏移,然后将其转换成距离信息。采用运行时间技术,即使目标距离较远,也可以精确可靠地进行检测。

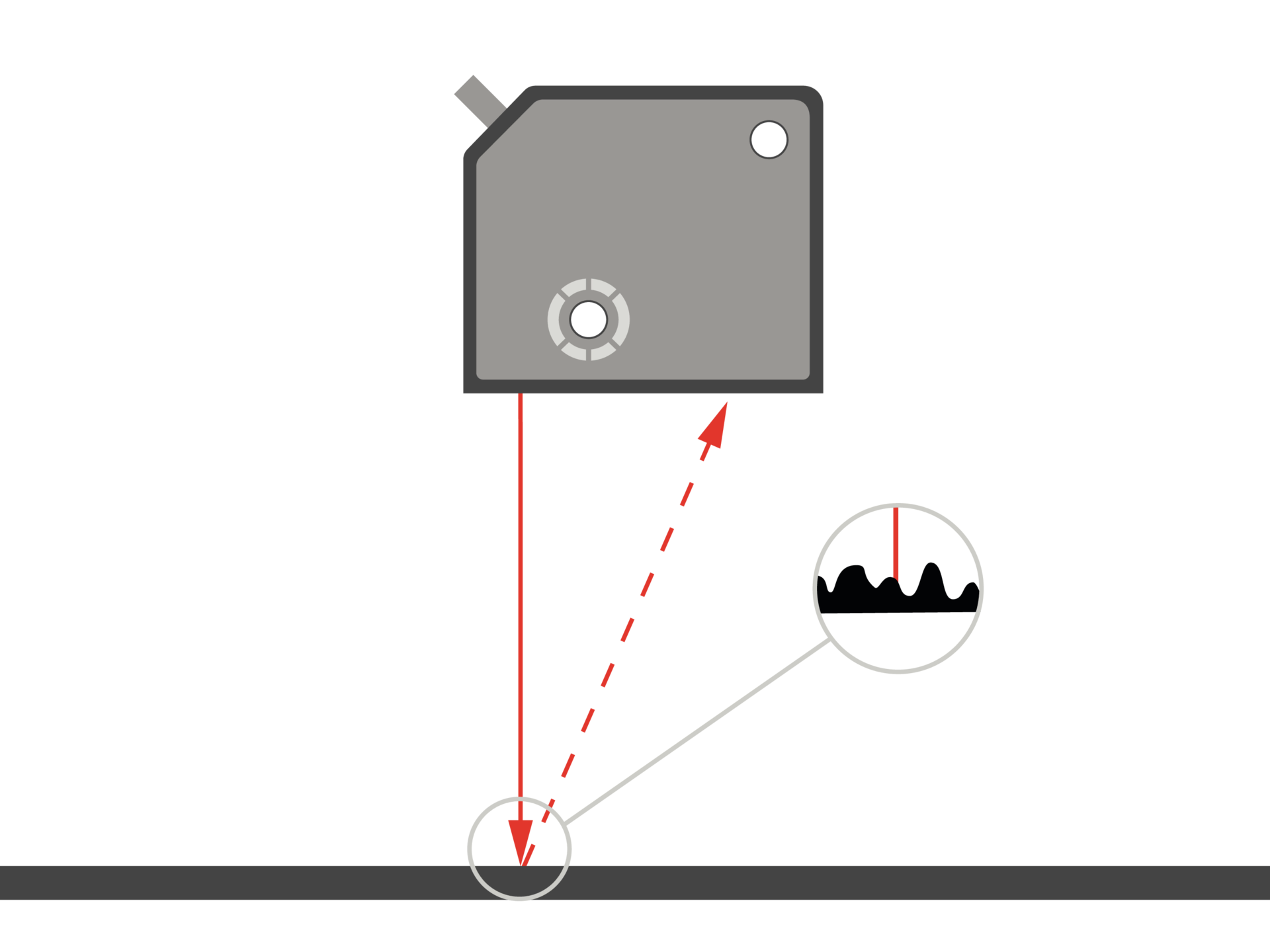
激光测距传感器又称激光位移传感器,用于测量距离,以检测一定范围内的物体。激光测距传感器可采用多种测量技术,其中最重要的一种是三角测量原理。根据该原理,点激光或线激光被投射到需要测定位置的物体上。物体将部分入射光反射,然后被传感器内部的光接收元件检测到。反射光在接收元件上的位置取决于传感器与物体之间的距离。因此,当距离发生变化时,光信号在接收元件上的位置也会发生变化。通过适当的校准,传感器就可以精确测量物体的距离。
关于激光测距传感器的更多信息

三角测量法是一种几何方法,通过在已知参考点和目标物之间形成三角形来测量物体距离。
其中的关键元件是激光源,它向目标物发射激光束。激光束从目标物反射回传感器,被对光信号位置敏感的接收元件捕捉到。入射角随物体距离而变化,因此光信号在接收元件上的位置也会相应变化。利用预先校准的数据,就可以根据光信号在接收元件上的位置得出传感器与物体之间的距离。
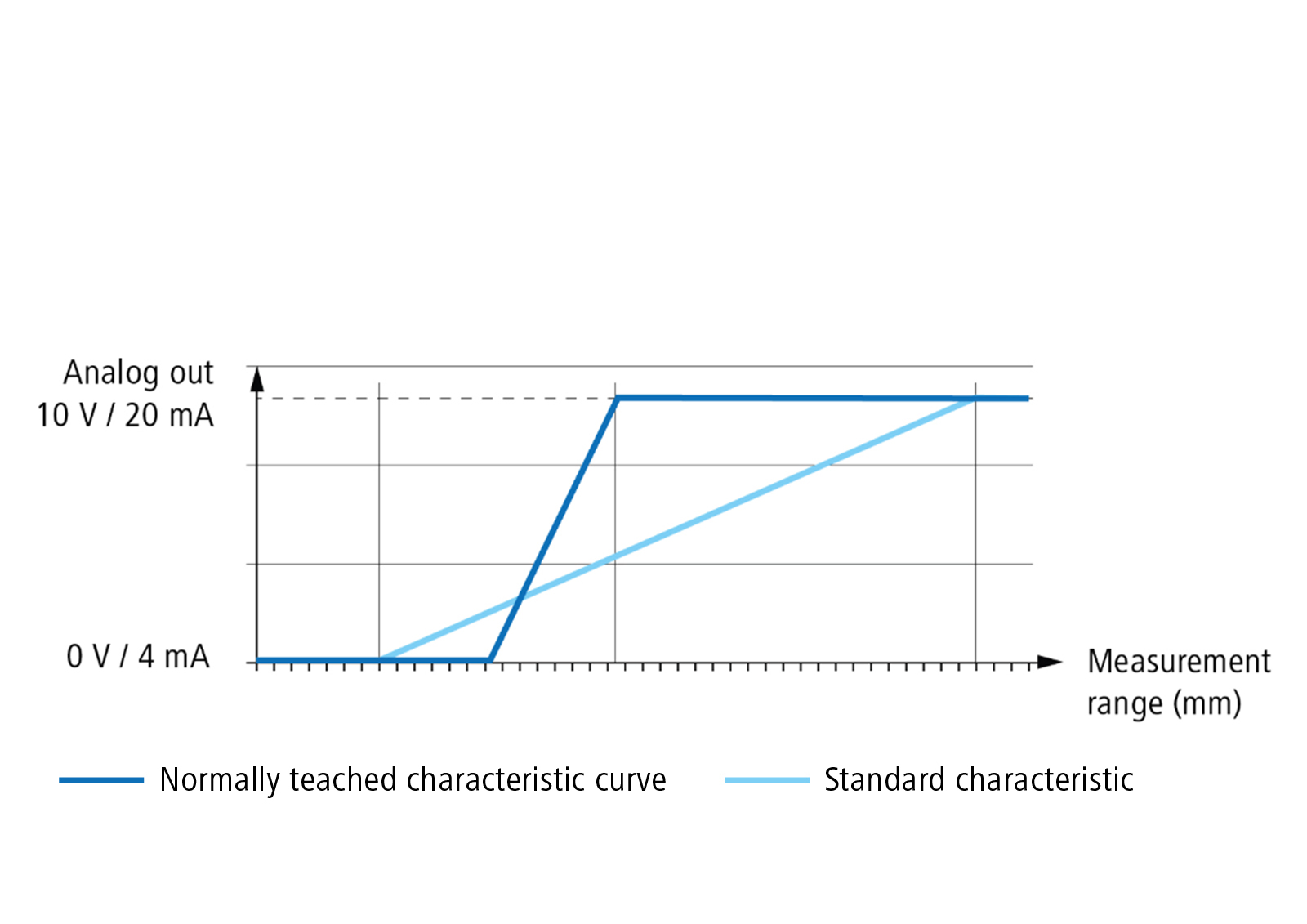
随着关键部件性能的不断提升,传感器的测量性能也随之提高,尤其是在难测表面上。例如,如果物体表面非常光滑而且光亮,那么光接收元件捕捉到的信号可能非常弱。
作为一项成熟的技术,三角测量法至今仍然是一种精确可靠的距离测量方法,并且在测量几十毫米到几米的距离时尤其具有优势。如果物体距离很远,三角测量法的精度和可靠性会降低,此时应该选择其他技术。
基于三角测量原理的现代传感器提供多种接口,通常可以无缝集成到控制系统中。IO-Link和其他串行接口一样,几乎无处不在。更高端的产品还提供基于以太网的协议,如Profinet、EtherNet/IP、EtherCAT 或 OPC UA。