China
cn
中文

给您带来的益处
- 开发和制造成本低
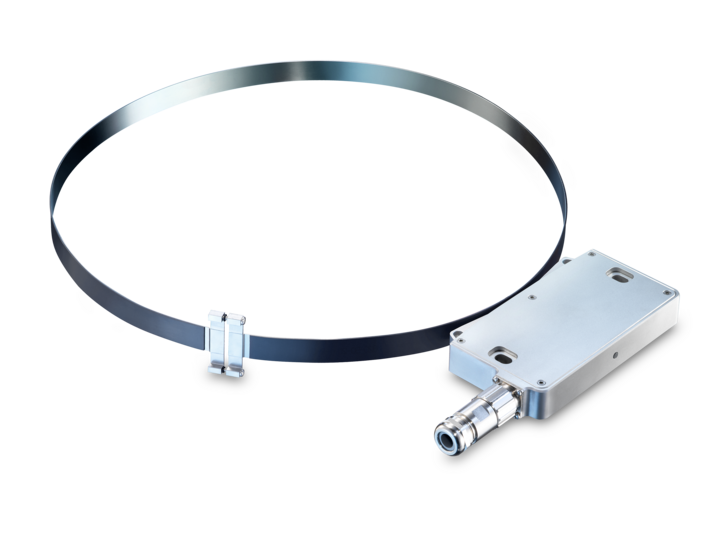
- 编码器选型灵活,可支持不同轴径(3 m以上),轻松满足设计要求,客户无需更改系统设计
- 精确的磁感应技术确保可靠的速度信号
- 配备精密磁环,融合了堡盟多年来在磁感应方面积累的专业知识
- 超高分辨率编码器,强大的信号处理能力
- 即使在恶劣工况下也能长期可靠运行
- 无磨损、非接触式磁感应技术
- 防尘
- 抗冲击和抗振动
- 长期保持高防护等级
- 采用无轴承设计,具有高性价比和高防护等级
- 即使在高速运转时,编码器也能防止水和灰尘的侵入
- 电子元件和活动部件分离,提高了坚固性
- 不受轴电流影响
- 安装在大功率电力驱动装置上的旋转编码器的滚珠轴承可能因电流过冲而损坏
- 感应头与轴分离有效解决了这一问题
- 设备结构紧凑
- 可通过A面或B面接口灵活集成
- 采用径向感应,安装深度浅
应用领域
风力发电机

Steel and metal industry
Mining
Ports
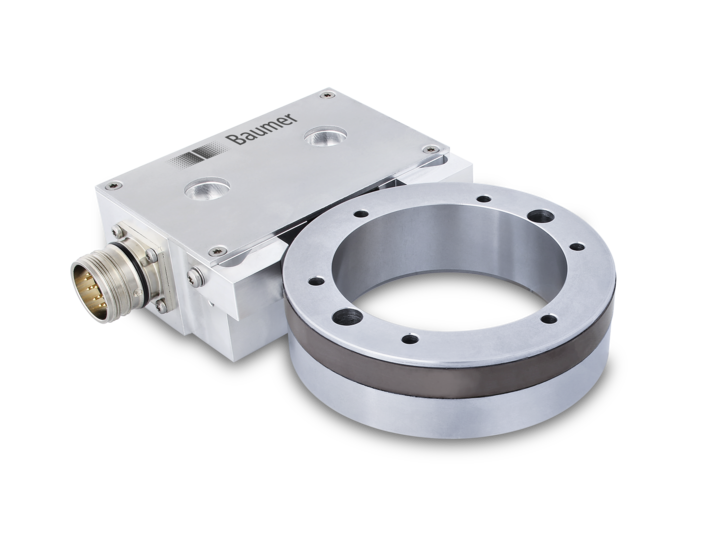
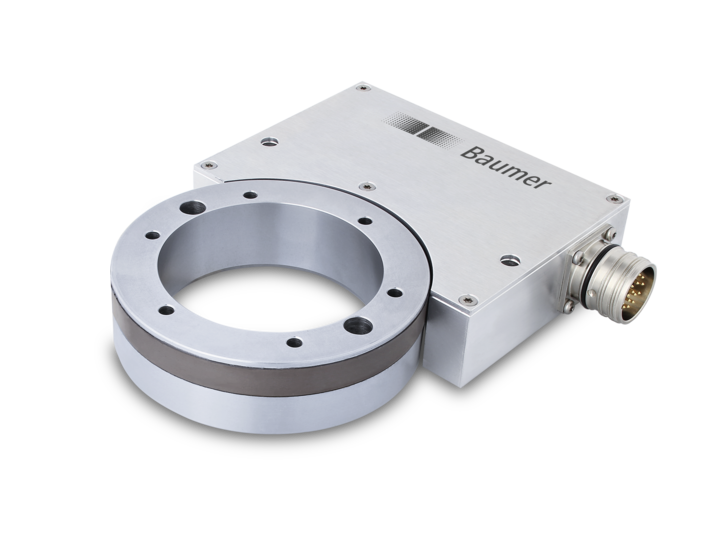
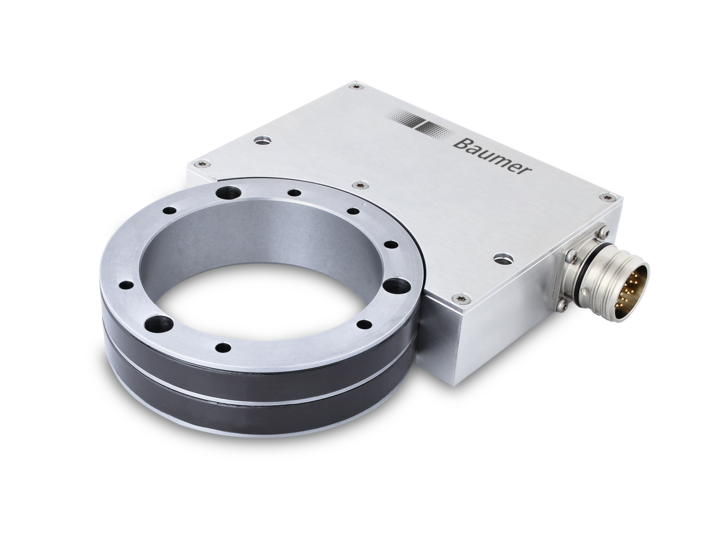
技术亮点
磁感应技术允许感应单元和磁体(通常是磁环)之间存在较大的间隙。因此,二者可以分开安装,而不必像传统旋转编码器一样需要借助精密滚珠轴承才能完成安装。同时,这种设计允许较大的安装误差,从而提高设计和安装灵活性。此外,没有轴承,也就没有常见的磨损现象。因此,无轴承编码器能有效抵御灰尘、污垢或纺织纤维。此外,编码器还不受轴电流或轴承载荷的影响,具有出色的抗振动和抗冲击能力。
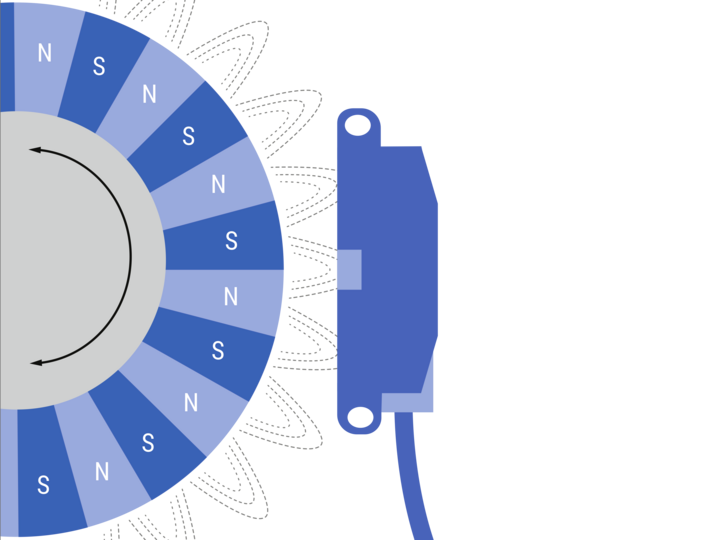
Functionality of radial sensing
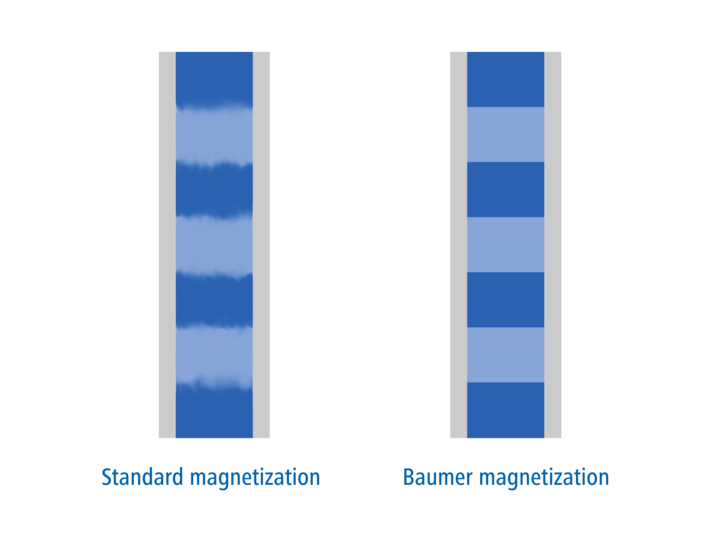
精确的磁感应技术确保高信号质量

Pole pitch determines resolution and installation tolerance
Permanently high IP protection class
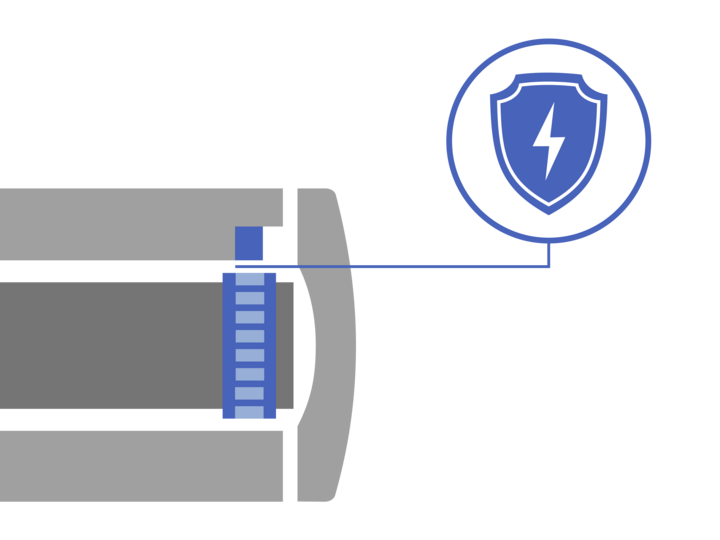
Immune against shaft currents
下载
手册 / 产品目录
-
手册:旋转编码器和角度测量选型指南