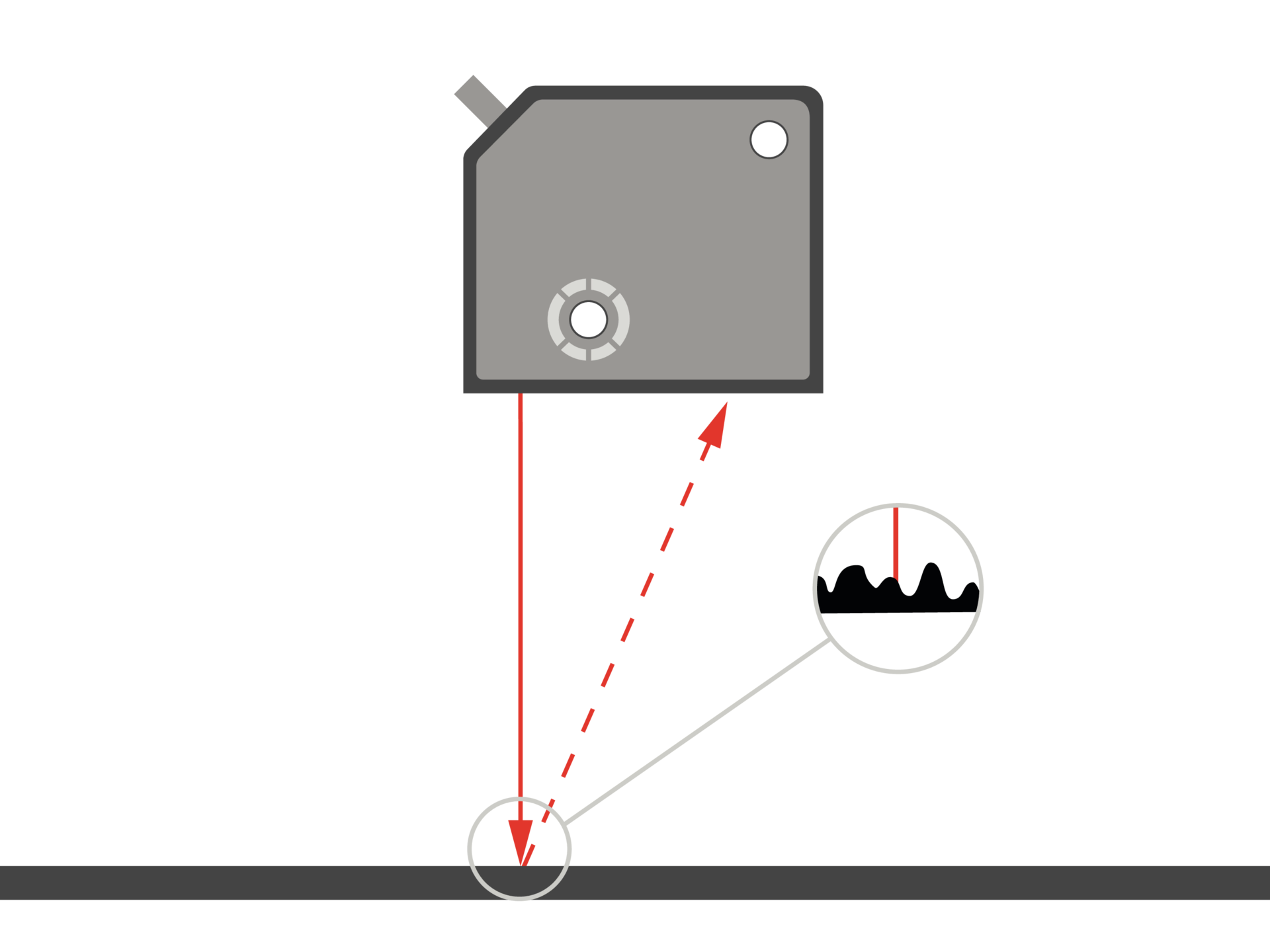









With the time-of-flight measurement method distances are measured indirectly by measuring the time required by a signal to travel the length of the range to be covered. This translates into the real world as follows: a sender unit is emitting a burst signal which, when reflected by an object, is picked up by the sensor's receiver. The sensor's electronics evaluates the time elapsed and/or the phase-shift encountered which is then converted into distance information. By applying the run time technology objects can be detected precisely and reliably even at long distances.