China
cn
中文
021 - 67687095
Menu
搜索
资讯
新闻稿
联系我们
产品
产品
产品概要
目标物检测
目标物检测
用于目标物及位置检测的接近开关和光栅原理传感器。
电感式接近开关
光栅/光电传感器
光纤传感器及光纤
电容式传感器
超声波传感器
磁性接近传感器
机械式精密开关
边缘检测传感器
标签传感器
传感器附件
距离测量
距离测量
用于测距和采集距离信息的传感器,测量范围从微米到60米以上
激光测距传感器
超声波测距传感器
雷达传感器
电感式测距传感器
线性磁式编码器
测量轮编码器
拉线编码器
传感器附件
智能视觉传感器
智能视觉传感器
轻松解决高效检测和控制任务,快速实现视觉引导机器人应用。
智能型2D轮廓传感器
VeriSens视觉传感器
轻松控制优傲机器人
工业相机 / 图像处理
工业相机 / 图像处理
基于相机的检查、识别和过程控制。
工业相机
软件
入门套件
工具
定制相机
图像处理配件
VeriSens视觉传感器
识别
识别
读取和评估一维/二维码和文本
IDC系列多码读码器
VeriSens ID系列
入门套件
旋转编码器/角度传感器
旋转编码器/角度传感器
测量和监控机器、设备和电驱动装置的转速和转轴位置。
绝对值工业编码器
增量式工业编码器
无轴承编码器
同步电机编码器
绝对值重载编码器
增量式重载编码器
重载测速发电机/旋转变压器
重载超速开关/转速监测器
重载组合
参数可设置的编码器
功能安全型编码器
实时Ethernet接口编码器
船舶与海洋工程用旋转编码器
旋转编码器/角度传感器附件
倾角仪/加速度传感器
倾角仪/加速度传感器
测量倾角、加速度和振动
倾角仪
动态倾角仪
振动传感器/加速度传感器
过程传感器
过程传感器
过程自动化技术,包括变送器、传感器和测量设备,用于测量气体、液体、粘性和颗粒状介质的压力、温度、物位、流量以及电导率等参数。
压力测量
物位传感器
流量测量
液体分析
温度测量
带触摸屏的CombiView DFON显示模块
过程传感器附件
力传感器和应变传感器
力传感器和应变传感器
各种机器、设备和模具的力和应变测量。
力传感器
应变传感器
测力放大器
定制解决方案
模腔压力传感器
孔内应变测量
计数器/显示模块
计数器/显示模块
采集并显示件数、时间、转速及位置等过程数据和测量值,并对这些数据进行控制。
显示模块
累加器
时间和工作小时计数器
预设计数器
计数器/显示模块附件
附件
附件
丰富的附件选择,总有一款适合您的产品和应用
旋转编码器/角度传感器附件
计数器/显示模块附件
传感器附件
过程传感器附件
图像处理配件
电缆/连接
电缆/连接
电缆/连接
轻松连接、设置和使用传感器
电缆/接插件
IO-Link主站
IO-Link转换器
IO-Link集线器
堡盟传感器套件
工程设计工具
格式调整
格式调整
高效的主轴定位
NM170
NM172
NM174
解决方案
解决方案
应用解决方案
堡盟为众多行业提供全面的增值解决方案。以下为您介绍堡盟产品在多个重点领域的精彩应用。
内部物流系统的理想选择
工程机械自动化
食品饮料
包装行业
轨道交通
钢铁和冶金
制药行业
机器人臂端工具
进料技术
数字化
公司
公司
公司
作为一家全球性家族企业,堡盟对传感器技术、编码器、测量仪表以及自动化图像处理组件充满热情。
分支机构
管理层
价值观
发展历程
研发
卓越运营
所获奖项
堡盟瑞士创新中心
博登湖高科技中心
证书
堡盟供应商
环境管理
展会
职业发展
职业发展
职业发展
研发 | 工业工程
产品管理
营销 & 销售
生产、采购和物流
共享服务
年轻人才
职业动态
在招职位
服务与支持
服务与支持
服务与支持
联系信息
专业技术
序列号查询
维修与索赔管理
解决方案
机器人臂端工具
Gripping force
夹持力
分享
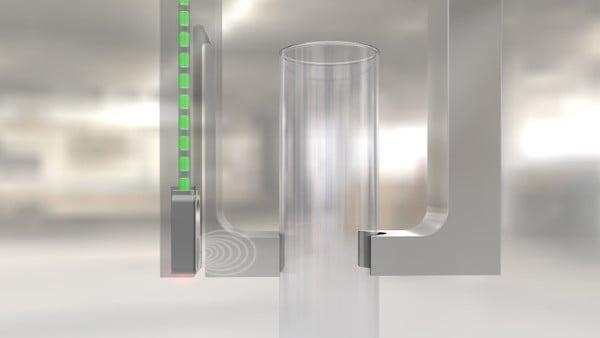
任务:通过测量妥当设计的夹爪手指在抓取期间的位移/弯曲度来间接测量夹持力。
产品
适用于狭窄安装空间的传感器
电感式测距传感器
超级小巧的电感式测距传感器
圆柱形设计,直径4-6 mm
矩形设计,高度最低4.7 mm
测量范围达12 mm
内置放大器
在产品选择器中打开
回到顶部